繁
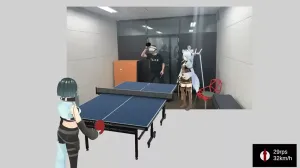
游戏公司Tenbillion近日为其VR乒乓球游戏《TenbillionTableTennis》推出了一项名为「MR合成」的新功能。该功能支持将玩家的真实影像与VTuber或3D虚拟角色进行实时混合,实现虚拟与现实的深度融合。同时,游戏还新增了对在线协作直播的支持,即使身处不同地点的用户也能共享同一场游戏体验。《TenbillionTableTennis》自发布以来,一直致力于还原真实乒乓球运动的沉浸感。戴上VR头显后,玩家仿佛置身于客厅中一张真实的乒乓球台前,不仅能感受到逼真的空间尺度,其对球拍握持方式、球体运动轨迹的精准模拟,也让单人训练与在线对战模式都具备了高度的可玩性与竞技性。MR技术赋能直播场景,内容创作门槛进一步降低此次更新的核心在于「MR合成」功能的引入。该功能允许将实际操作VR设备的玩家画面与3D虚拟形象(如VTuber)自然融合,特别针对直播场景进行了优化。无论是游戏主播、虚拟偶像,还是粉丝社群组织的互动赛事,均可利用此功能提升内容表现力和观赏性。在具体使用上,用户可通过设置游戏内背景为绿幕模式,并选择仅显示虚拟球拍等选项,灵活调整合成效果。这一设计显著提升了直播布景的自由度,也为轻量级内容创作者提供了专业级视觉效果的可能性。技术实现路径明确,兼容主流虚拟形象格式要启用MR合成功能,需同时运行MetaQuest版与PC版《TenbillionTableTennis》。两者需加入同一房间,并将PC端的游戏摄像机视角与手机或Web摄像头的拍摄角度对齐,以确保虚拟与现实空间的一致性。系统支持VRM格式的3D模型文件,用户可借助OBSStudio等主流直播软件完成画面合成。所需硬件包括MetaQuest2或更新型号的头显、一台WindowsPC,以及用于拍摄的智能手机或摄像头。值得注意的是,PC版在此流程中仅作为观战与摄像用途,目前尚未支持PCVR设备直接参与MR合成体验。标题百亿乒乓球类型/价格免费玩家人数单人游戏、多人游戏兼容型号MetaQuest2/MetaQuestPro/MetaQuest3/MetaQuest3SMeta商店www.meta.com/experiences/tenbillion-table-tennis-ping-pong-vr/7074450812583727/WindowsPC版本tenbillion-mods.vercel.app/pc(加入官方Discord才能访问)
为什么MetaQuest3不支持"持续场景建模"?MetaCTO解释背后的挑战从用户角度来看,环境扫描(roomscanning)一直是影响MetaQuest3和Quest3S混合现实(MR)体验的主要障碍之一。目前,用户在使用混合现实应用前,必须提前对房间进行一次完整的扫描,这个过程可能需要几分钟时间,具体取决于房间的大小和复杂程度。更麻烦的是,一旦家具位置发生变化,当前的3D场景模型是静态的,需要手动重新扫描才能更新--有时甚至要完全重做。这种繁琐的操作流程让不少用户体验大打折扣。试想一下,工作了一整天回到家,只想戴上头显放松一下,却还要先花几分钟扫描房间,才能开始玩MR游戏,这对普通用户来说确实不太友好。MetaCTO揭秘:持续扫描为何尚未实现?在最近一次Instagram的AMA(AskMeAnything)问答中,Meta首席技术官AndrewBosworth回应了关于Quest系列设备为何尚未支持"持续场景建模"(continuousscenemeshing)的问题,并详细解释了背后的技术挑战。他表示:"这个问题其实有两个层面。第一就是计算资源。持续不断地重新计算你周围环境的变化是非常耗费性能的。而这些热能和计算资源,我们也可以用在其他方面,我们认为那些功能可能对你更有价值。第二个难点在于模型本身。如果你已经预先构建好了整个环境模型并交给应用程序,那它就可以对这个空间做出很多预测。但如果环境是不断变化的,应用程序就必须具备更高的动态响应能力。比如这张桌子可能会移动,沙发也可能会被搬走,那么在这种情况下,应用该如何应对?"Bosworth进一步指出:"目前大多数混合现实体验都发生在相对静态的环境中。但这种情况未来会改变。我可以明确地说,我们最终会实现这一点--持续建模将成为一种常态。"他还提到,Meta曾经尝试过一些初步方案,例如检测用户是否越界等行为。"但这始终是一个权衡问题--一方面受限于当前的算力,另一方面也要考虑开发者长期使用的模型架构。"苹果VisionPro已实现,Quest为何落后?提问的用户也指出了一个现实问题:像AppleVisionPro这样的设备已经实现了"持续房间扫描"的功能。关键区别在于硬件配置。VisionPro内置了LiDAR(激光雷达)传感器,能够快速、精准地捕捉环境深度信息,为实时建模提供了强有力的支持。而MetaQuest3和3S主要依赖于计算机视觉算法来完成环境感知任务,这种方式虽然成本更低,但也带来了更大的计算负担,尤其是在需要实时更新的场景下。尽管部分VR开发者正在尝试通过自定义算法实现类似的连续扫描功能,但这些方案往往会导致显著的性能损耗,尤其在当前硬件条件下并不实用。Quest4或将带来突破?如果未来的MetaQuest4能够搭载更强的深度传感器(如LiDAR)以及更高性能的处理器,那么"手动扫描房间"的操作或许将成为历史。不过,加入这类先进硬件也会带来额外的成本压力,从而可能导致设备价格上升。今年早些时候,Meta曾透露正在改进房间扫描系统,但截至目前,官方尚未公布任何具体的时间表。总结:技术路线不同,Meta正在稳步推进尽管目前的Quest3还不支持持续场景建模,但这并非因为Meta技术落后,而是出于性能与实用性之间的平衡考量。随着硬件升级和软件优化的推进,这一功能在未来可期。对于期待更智能、更无缝的混合现实体验的用户而言,也许只需耐心等待,就能看到Meta在下一代表现更出色的MR头显中实现这一目标。