繁

增强现实技术开发商 Niantic Spatial 今日正式宣布推出 Scaniverse。这是一个集网页端与移动端于一体的平台,专门用于捕捉物理空间并生成空间资产。与此同时,公司还发布了其更新版的视觉定位系统 VPS 2.0。
Niantic 将 Scaniverse 描述为其空间智能服务和大型地理空间模型的“门户”。它能让用户捕捉 3D 空间,并生成视觉定位地图、网格(meshes)和高斯泼溅(Gaussian splats)。
适用范围: 该平台支持从单个房间到数千平方米区域的空间捕捉。
兼容设备: 支持包括消费级智能手机和 360° 全景相机在内的多种设备。
未来计划: 公司表示,今年晚些时候计划增加对更多数据捕捉类型和格式的支持。
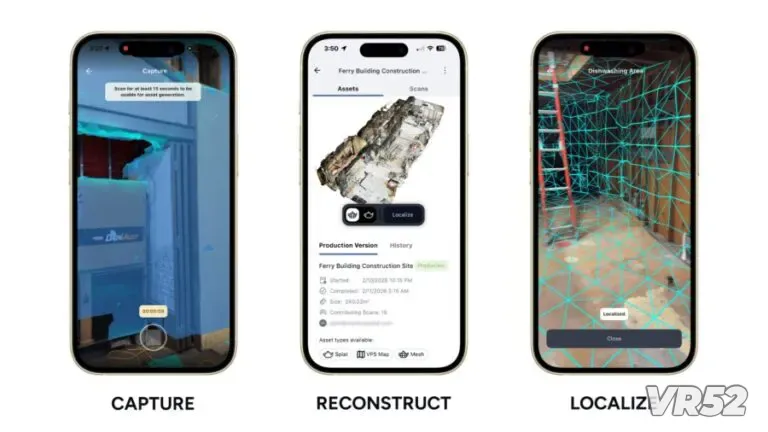
更新后的 Scaniverse 应用程序允许用户通过单次扫描或在查看器中合并多次扫描来生成视觉定位地图、网格和泼溅图。
协作与云端: 多位用户可以在不同时间和设备上为同一个共享项目贡献扫描数据。上传的数据会存储在云端,并随着新扫描的加入融合成单一模型。
现场预览: 应用程序包含设备端的 VPS 地图预览功能,允许用户在现场(包括低网络连接环境)进行覆盖范围和质量检查。
用户体验: 现有 Scaniverse 用户的使用体验保持不变。
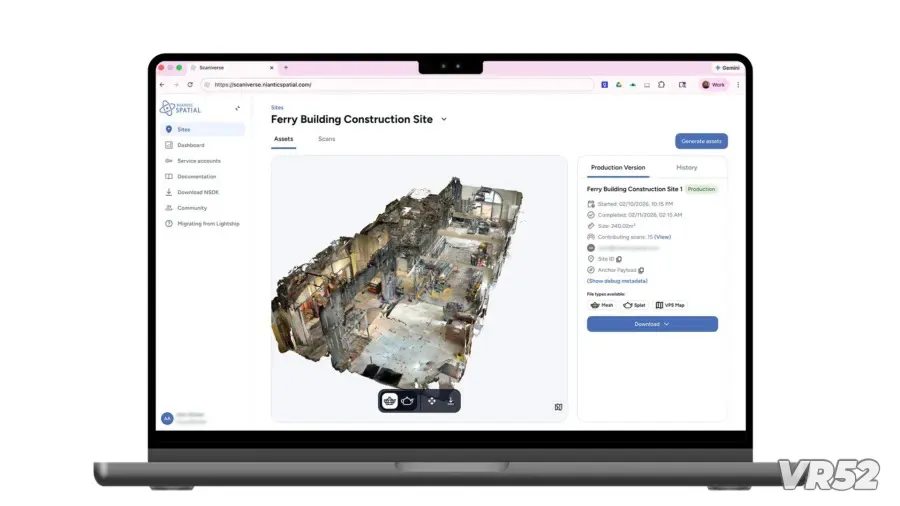
网页版 Scaniverse 提供了一个基于浏览器的门户,用于上传、管理和处理来自移动应用及 360° 相机的数据,并在查看器中可视化输出结果。
数据处理: 用户可以上传 360° 相机 footage 以重建大面积区域的高斯泼溅图,并生成和预览用于 Niantic Spatial VPS 的网格、泼溅图和位置地图。
即将支持: 对 360° 相机 footage 的 VPS 支持即将推出。
导出格式: 资产可以导出为 FBX、PLY 和 SPZ 格式。据 Niantic Spatial 称,文件还可以转换并导入到机器人模拟器中。
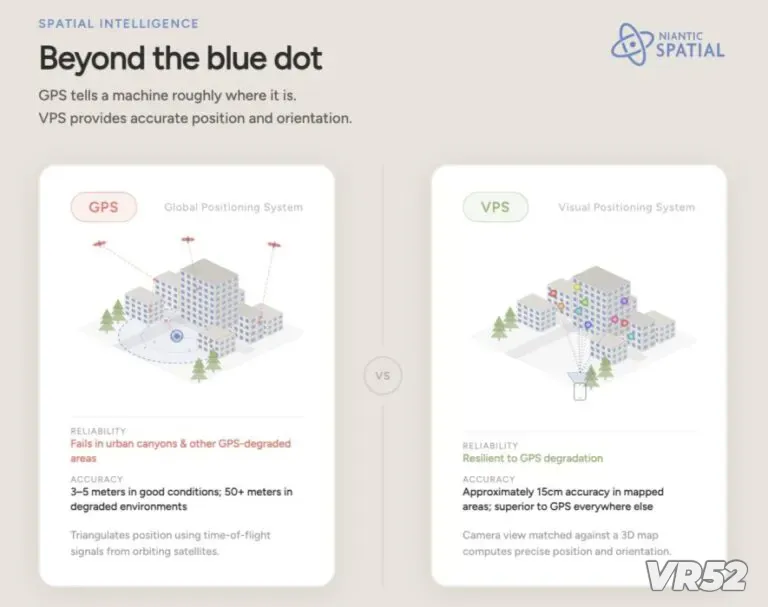
伴随 Scaniverse 一同发布的还有 VPS 2.0,这是一个可在全球范围内运行的更新版视觉定位系统。
超高精度: Niantic Spatial 表示,在通过 Scaniverse 映射的区域,VPS 能提供接近厘米级精度的 6DoF(六自由度)定位。相比之下,GPS 在理想条件下的精度约为 3-5 米。
无需预扫描: VPS 2.0 消除了对地点进行预扫描的需求,并能增强 GPS 以提供 3DoF 定位。
抗干扰能力: 该系统利用视觉上下文和多种数据源来修正 GPS 漂移和信号丢失,从而在 GPS 信号可能较弱的环境中提供稳定、一致的位置信息。
最终结果是一个统一的系统:它首先通过全球 VPS 提供更广泛的可靠定位,然后在进入 Scaniverse 映射的区域时,无缝切换到接近厘米级精度的 6DoF 定位。
Niantic 指出,Scaniverse 和 VPS 专为以下领域设计:
机器人 OEM 厂商和运营商: 用于在室内或 GPS 信号弱、难以维持位置的机器人。
能源、建筑和物流: 将复杂的站点映射为团队和机器共享的空间模型。
公共部门: 用于 GPS 信号可能减弱或不可用,需要更可靠位置和航向数据的环境。
大型场馆: 用于持久化、位置感知的空间应用。
此外,公司还宣布 NSDK 4.0 将于本月正式向公众开放,支持 Swift、Unity、原生 Android,并可应要求提供对 ROS 2 的早期支持,从而将开发者直接连接到 Scaniverse 和 VPS 2.0。



VR52网成立于2015年,平台提供VR头显、AR眼镜、配件外设、厂商、测评、行业资讯、游戏与应用、展会活动等。







